template<typename
TScalarType = double>
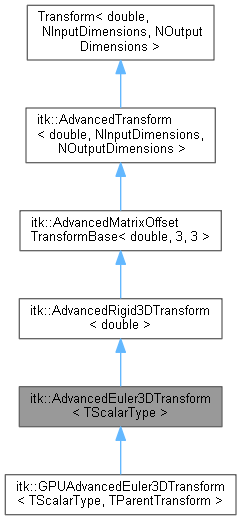
class itk::AdvancedEuler3DTransform< TScalarType >
AdvancedEuler3DTransform of a vector space (e.g. space coordinates).
This transform applies a rotation and translation to the space given 3 euler angles and a 3D translation. Rotation is about a user specified center.
The parameters for this transform can be set either using individual Set methods or in serialized form using SetParameters() and SetFixedParameters().
The serialization of the optimizable parameters is an array of 6 elements. The first 3 represents three euler angle of rotation respectively about the X, Y and Z axis. The last 3 parameters defines the translation in each dimension.
The serialization of the fixed parameters is an array of 3 elements defining the center of rotation.
Definition at line 64 of file itkAdvancedEuler3DTransform.h.
|
| using | AngleType = typename Superclass::ScalarType |
| using | ConstPointer = SmartPointer<const Self> |
| using | Pointer = SmartPointer<Self> |
| using | Self = AdvancedEuler3DTransform |
| using | Superclass = AdvancedRigid3DTransform<TScalarType> |
| using | ConstPointer |
| typedef typename SpatialJacobianType::InternalMatrixType | InternalMatrixType |
| typedef std::vector< SpatialHessianType > | JacobianOfSpatialHessianType |
| typedef std::vector< SpatialJacobianType > | JacobianOfSpatialJacobianType |
| typedef std::vector< uint64_t > | NonZeroJacobianIndicesType |
| using | Pointer |
| using | Self |
| typedef FixedArray< Matrix< ScalarType, InputSpaceDimension, InputSpaceDimension >, OutputSpaceDimension > | SpatialHessianType |
| typedef Matrix< ScalarType, OutputSpaceDimension, InputSpaceDimension > | SpatialJacobianType |
| using | Superclass |
| using | CenterType |
| using | ConstPointer |
| typedef typename SpatialJacobianType::InternalMatrixType | InternalMatrixType |
| using | InverseMatrixType |
| typedef std::vector< SpatialHessianType > | JacobianOfSpatialHessianType |
| typedef std::vector< SpatialJacobianType > | JacobianOfSpatialJacobianType |
| using | MatrixType |
| typedef std::vector< uint64_t > | NonZeroJacobianIndicesType |
| using | OffsetType |
| using | Pointer |
| using | Self |
| typedef FixedArray< Matrix< ScalarType, InputSpaceDimension, InputSpaceDimension >, OutputSpaceDimension > | SpatialHessianType |
| typedef Matrix< ScalarType, OutputSpaceDimension, InputSpaceDimension > | SpatialJacobianType |
| using | Superclass |
| using | TranslationType |
| using | ConstPointer |
| using | InternalMatrixType |
| using | InverseTransformBaseType |
| using | JacobianOfSpatialHessianType |
| using | JacobianOfSpatialJacobianType |
| using | MovingImageGradientType |
| using | MovingImageGradientValueType |
| using | NonZeroJacobianIndicesType |
| using | Pointer |
| using | Self |
| using | SpatialHessianType |
| using | SpatialJacobianType |
| using | Superclass |
| using | TransformType |
| using | TransformTypeConstPointer |
| using | TransformTypePointer |
|
| virtual ScalarType | GetAngleX () const |
| virtual ScalarType | GetAngleY () const |
| virtual ScalarType | GetAngleZ () const |
| virtual bool | GetComputeZYX () const |
| const FixedParametersType & | GetFixedParameters () const override |
| void | GetJacobian (const InputPointType &, JacobianType &, NonZeroJacobianIndicesType &) const override |
| const ParametersType & | GetParameters () const override |
| | ITK_DISALLOW_COPY_AND_MOVE (AdvancedEuler3DTransform) |
| | itkOverrideGetNameOfClassMacro (AdvancedEuler3DTransform) |
| | itkStaticConstMacro (InputSpaceDimension, unsigned int, 3) |
| | itkStaticConstMacro (OutputSpaceDimension, unsigned int, 3) |
| | itkStaticConstMacro (ParametersDimension, unsigned int, 6) |
| | itkStaticConstMacro (SpaceDimension, unsigned int, 3) |
| virtual void | SetComputeZYX (const bool flag) |
| void | SetFixedParameters (const FixedParametersType ¶meters) override |
| void | SetIdentity () override |
| void | SetParameters (const ParametersType ¶meters) override |
| void | SetRotation (ScalarType angleX, ScalarType angleY, ScalarType angleZ) |
| | ITK_DISALLOW_COPY_AND_MOVE (AdvancedRigid3DTransform) |
| | itkOverrideGetNameOfClassMacro (AdvancedRigid3DTransform) |
| | itkStaticConstMacro (SpaceDimension, unsigned int, 3) |
| bool | MatrixIsOrthogonal (const MatrixType &matrix, double tol=1e-10) |
| void | SetMatrix (const MatrixType &matrix) override |
| void | SetParameters (const ParametersType ¶meters) override |
| const InputPointType & | GetCenter () const |
| const FixedParametersType & | GetFixedParameters () const override |
| void | GetJacobian (const InputPointType &, JacobianType &, NonZeroJacobianIndicesType &) const override |
| void | GetJacobianOfSpatialHessian (const InputPointType &, JacobianOfSpatialHessianType &, NonZeroJacobianIndicesType &) const override |
| void | GetJacobianOfSpatialJacobian (const InputPointType &, JacobianOfSpatialJacobianType &, NonZeroJacobianIndicesType &) const override |
| const MatrixType & | GetMatrix () const |
| const ParametersType & | GetParameters () const override |
| void | GetSpatialHessian (const InputPointType &, SpatialHessianType &) const override |
| void | GetSpatialJacobian (const InputPointType &, SpatialJacobianType &) const override |
| TransformCategoryEnum | GetTransformCategory () const override |
| const OutputVectorType & | GetTranslation () const |
| bool | IsLinear () const override |
| | itkOverrideGetNameOfClassMacro (AdvancedMatrixOffsetTransformBase) |
| | itkStaticConstMacro (InputSpaceDimension, unsigned int, NInputDimensions) |
| void | SetCenter (const InputPointType ¢er) |
| void | SetFixedParameters (const FixedParametersType &) override |
| void | SetParameters (const ParametersType ¶meters) override |
| void | SetTranslation (const OutputVectorType &translation) |
| OutputCovariantVectorType | TransformCovariantVector (const InputCovariantVectorType &vector) const override |
| OutputPointType | TransformPoint (const InputPointType &point) const override |
| OutputVectorType | TransformVector (const InputVectorType &vector) const override |
| void | ComputeJacobianWithRespectToParameters (const InputPointType &, JacobianType &) const override |
| virtual void | EvaluateJacobianWithImageGradientProduct (const InputPointType &inputPoint, const MovingImageGradientType &movingImageGradient, DerivativeType &imageJacobian, NonZeroJacobianIndicesType &nonZeroJacobianIndices) const |
| virtual bool | GetHasNonZeroJacobianOfSpatialHessian () const |
| virtual bool | GetHasNonZeroSpatialHessian () const |
| virtual NumberOfParametersType | GetNumberOfNonZeroJacobianIndices () const |
| | ITK_DISALLOW_COPY_AND_MOVE (AdvancedTransform) |
| | itkOverrideGetNameOfClassMacro (AdvancedTransform) |
| | itkStaticConstMacro (InputSpaceDimension, unsigned int, NInputDimensions) |
 1.16.1 (669aeeefca743c148e2d935b3d3c69535c7491e6)
1.16.1 (669aeeefca743c148e2d935b3d3c69535c7491e6)